光敏循迹小车
实训答辩汇报
两周实训成果展示
电子焊接|整车组装|循迹调试
大家好,我们是汽新2510班光敏循迹小车实训小组。本次汇报围绕任务、问题、解决方案、制作过程、调试数据和最终效果展开。
任务不是焊一块板,而是完成整车闭环

元件识别
认识电阻、电容、三极管、IC座、传感器;能说明作用和方向。
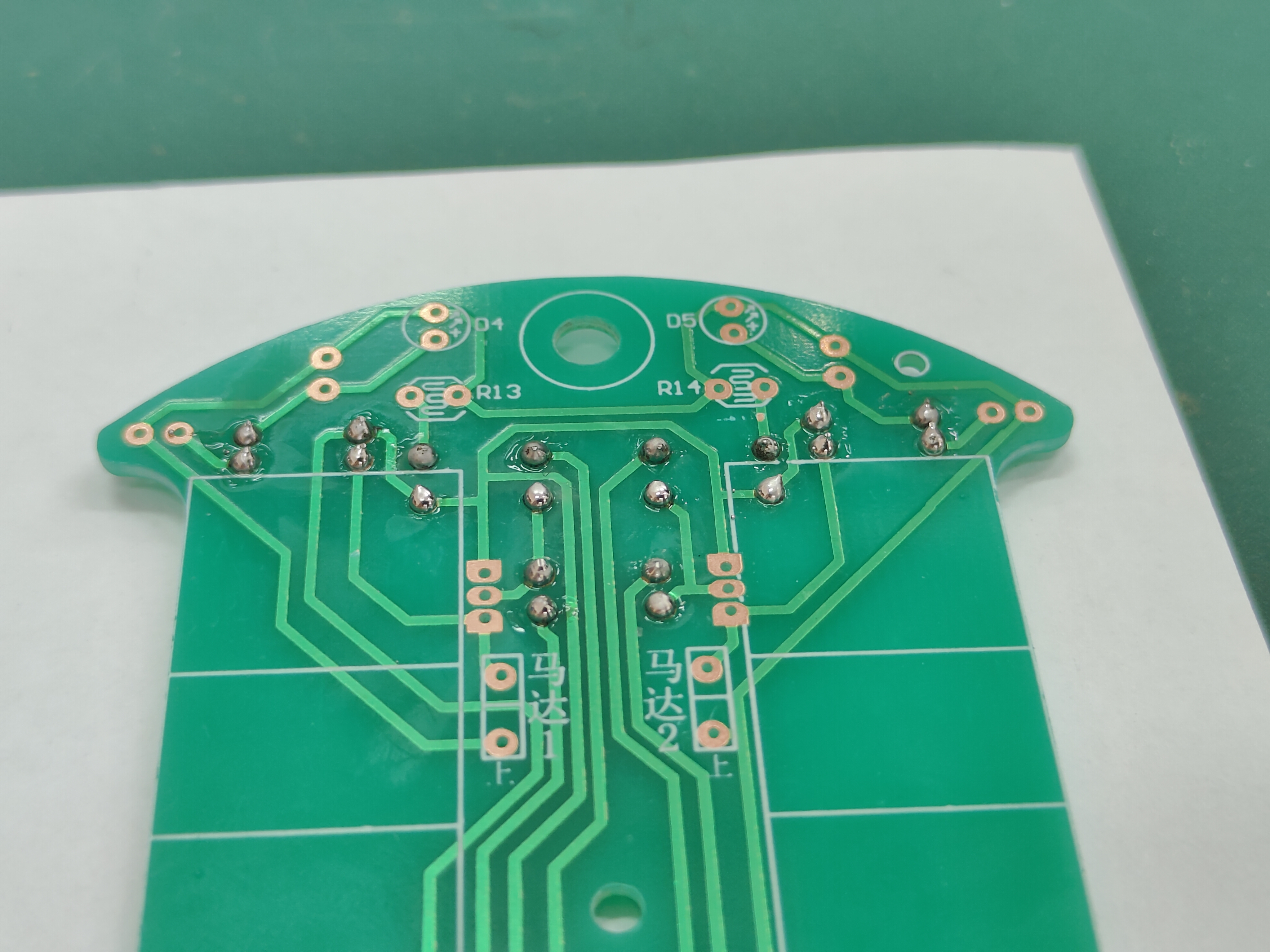
PCB焊接
按丝印完成焊接并检查焊点;重点避免虚焊、连锡和短路。
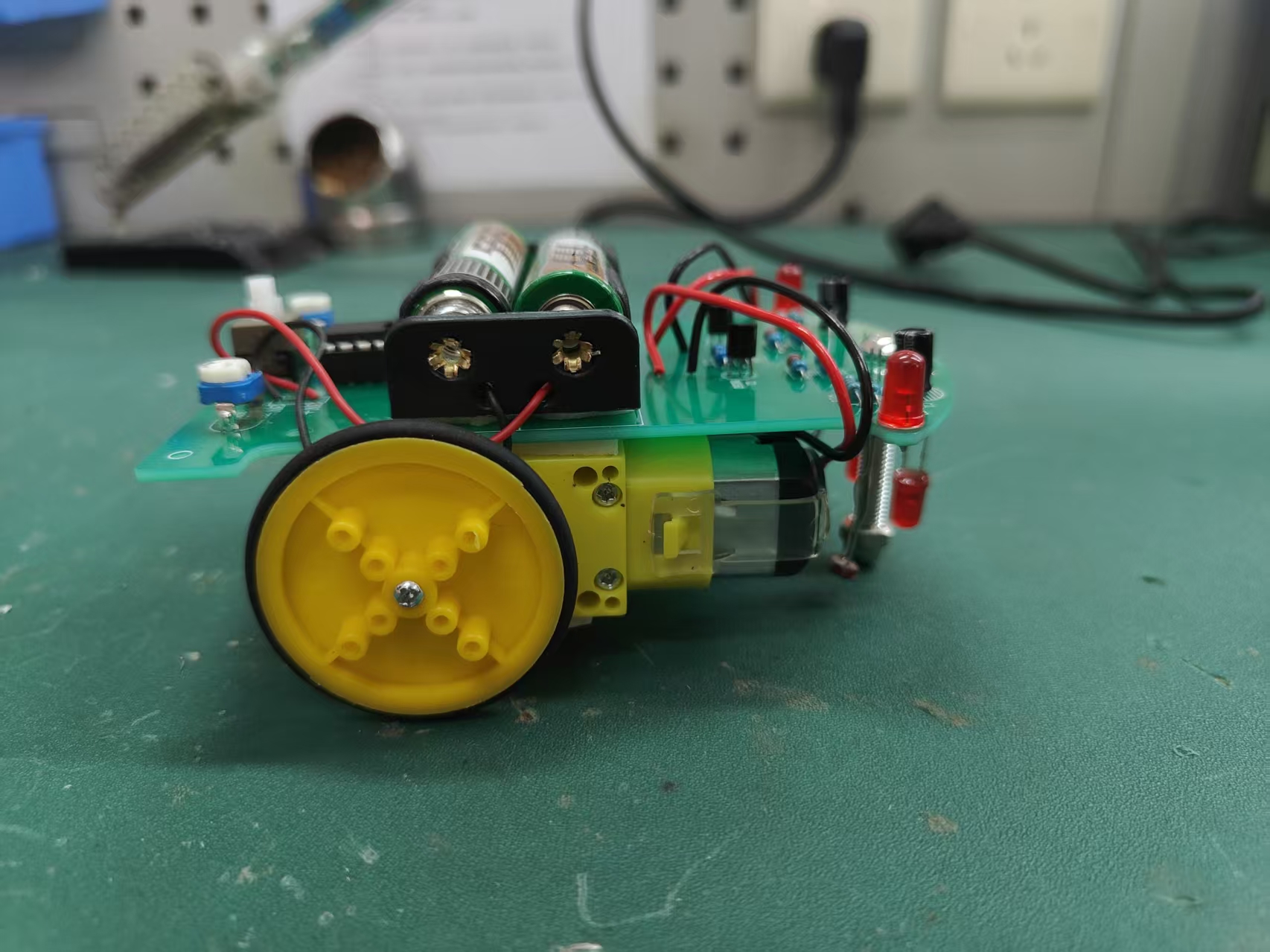
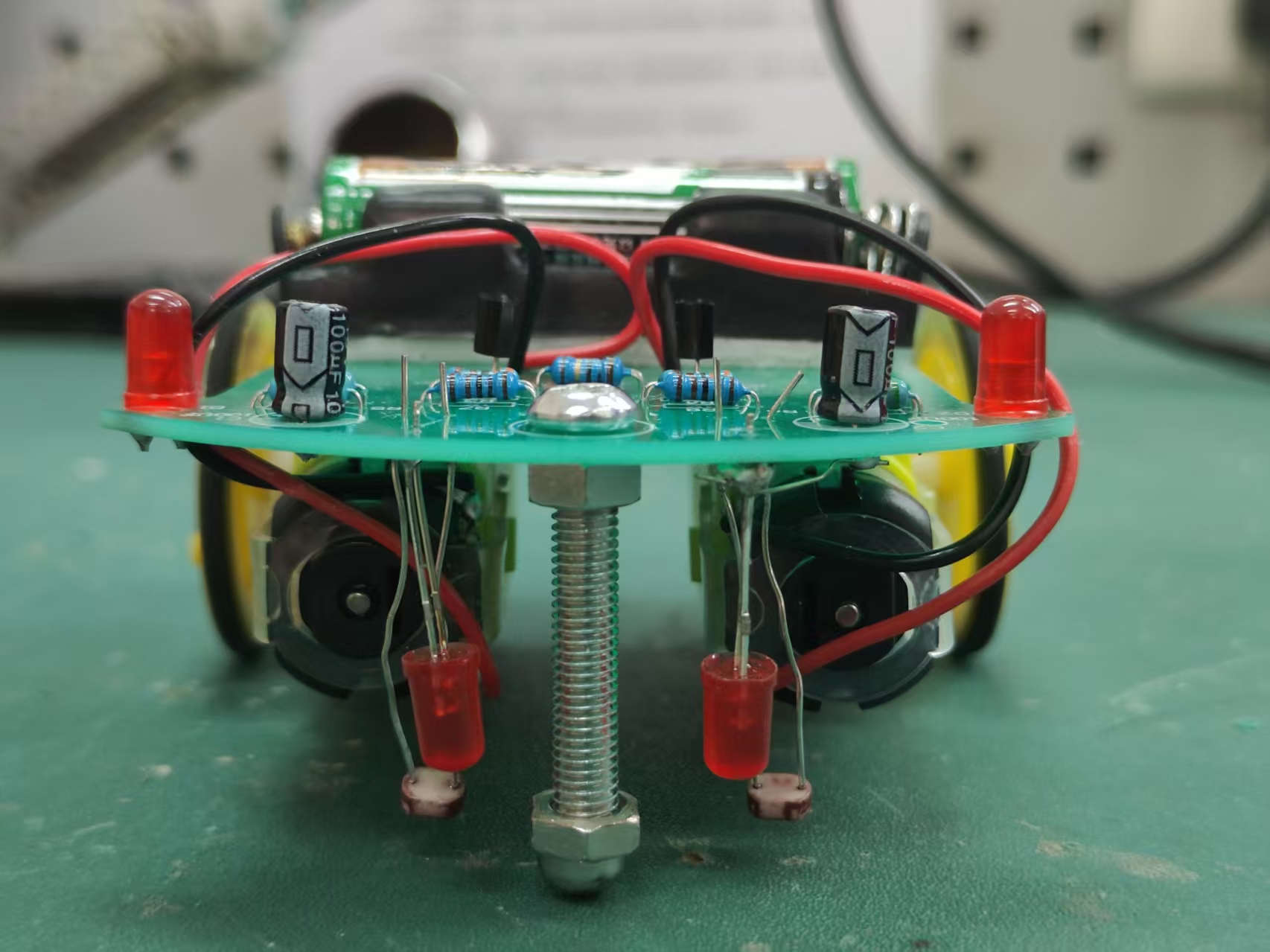
整车组装
安装电机、车轮、电池盒和电路板;保证车轮对称、导线不干涉。
循迹调试
调节灵敏度并进行轨道测试;最终要求能沿黑线基本行驶。
本次实训不是单纯焊接,而是完整项目。我们需要完成元件识别、PCB焊接、整车组装和循迹调试,并用最终运行效果验证系统是否可靠。
能运行,也要说明哪里还不稳
按黑白轨迹自动调整方向。
主要元件已焊接完成并检查。
电机、车轮、电池盒已安装。
逆时针方向循迹效果较好。
当前不足
顺时针转弯处偶尔失稳,说明后续仍需优化传感器高度、光照环境和车轮一致性。
接通电源后具备整车动作。
传感器可区分白底与黑线。
差速动作可修正方向。
项目目标是让小车根据黑白轨迹自动行驶。目前小车能启动、能识别黑白区域,也能完成基本循迹。需要继续优化的是顺时针转弯处的稳定性和光照影响。
故障集中在焊点、方向、传感器和机械结构
无动作或单边不转。
排查:补焊并测供电电容极性、三极管脚位、IC座方向可能错误。
排查:对照丝印复查不修正或修正过度。
排查:调可调电阻受光照、传感器角度和车轮平衡影响。
排查:调高度和场地左右车轮摩擦或高度不一致。
排查:调整车轮位置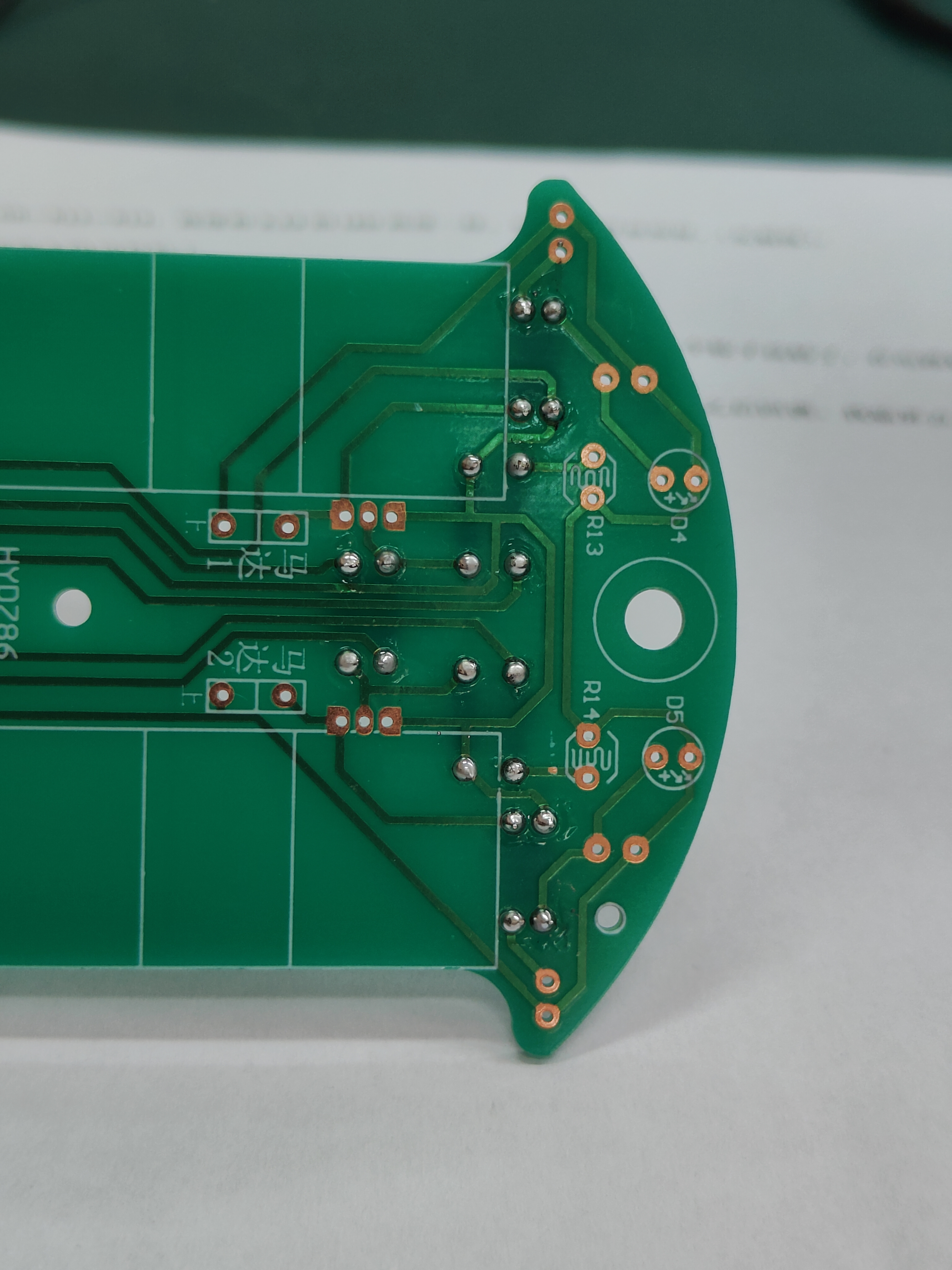
主要问题包括电机不转、元件方向错误、循迹失败、转弯失稳和跑偏。每个问题都对应不同检查动作,所以后续调试必须按问题分类处理。
两周实训流程:每一步都有明确产出物
认识作用和安装方向
产出:元件清单、极性确认先焊电阻、二极管等
产出:基础电路焊接完成再焊电容、IC座、开关
产出:PCB主体完成安装减速电机和底盘
产出:整车结构成型测电压、调灵敏度
产出:左右电机可控上轨道观察运行
产出:基本循迹效果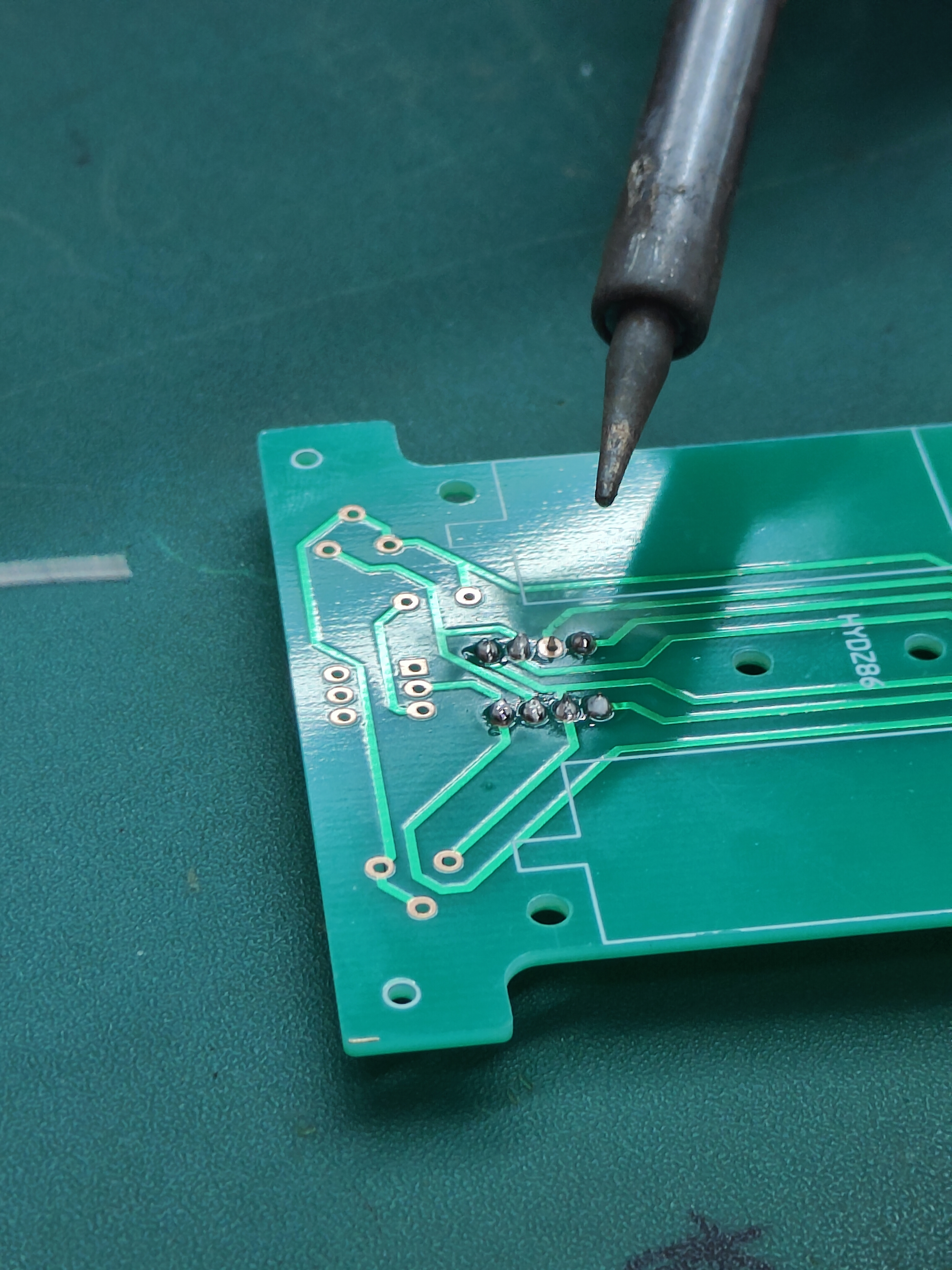

两周实训从元件识别开始,先焊低矮元件,再焊较高元件,然后进行电机车轮安装、电路调试和整车测试。每一步都有具体产出物。
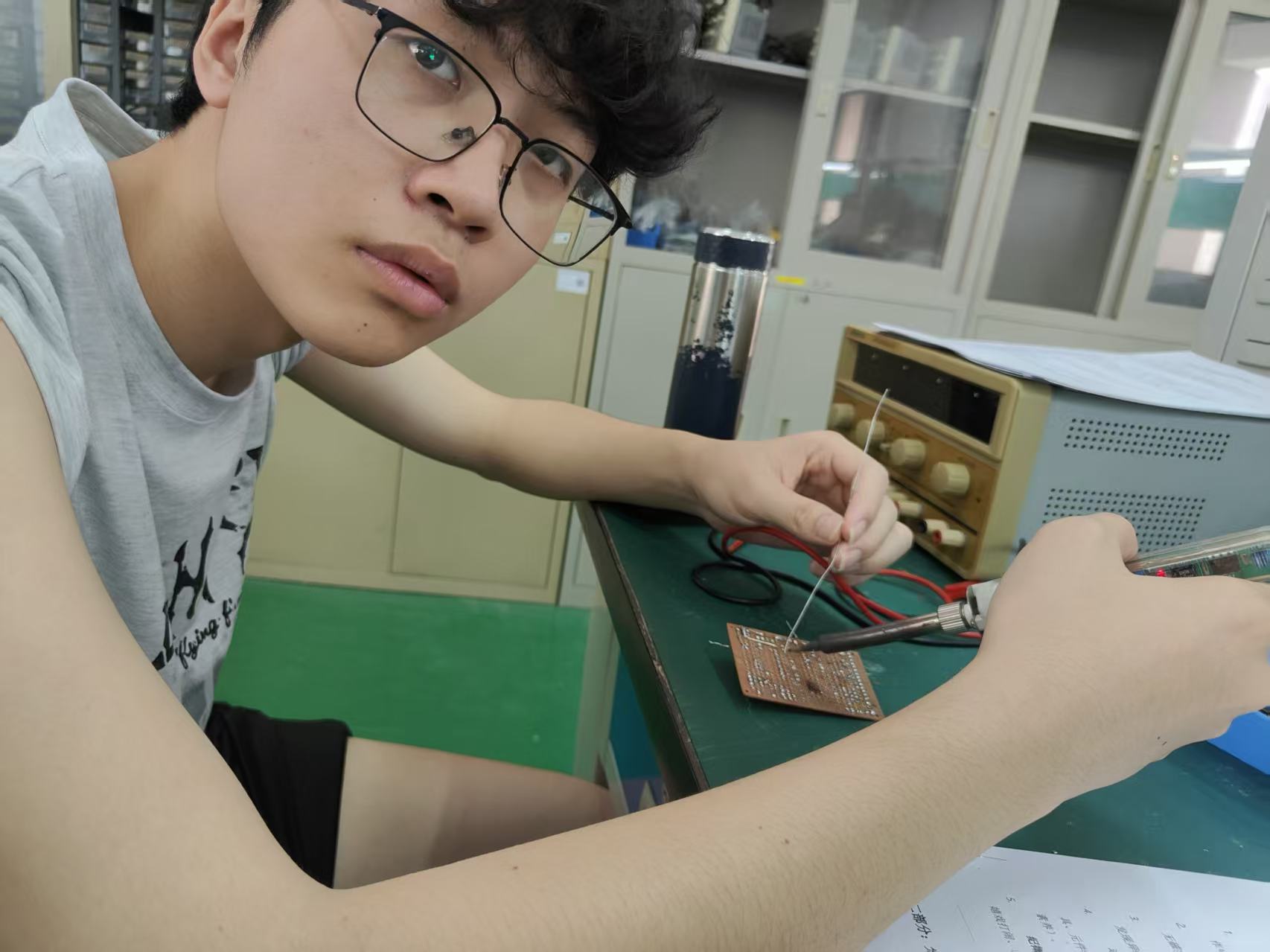
分工明确,调试阶段共同排查
关键贡献:整理任务逻辑和汇报结构。
关键贡献:保证PCB焊接质量。
关键贡献:完成运行测试和故障排查。
共同任务
共同复核线路、电机、传感器状态;在调试阶段交叉检查,减少误判。一个人观察运行,一个人调整传感器或电位器,另一个人记录测试状态。
我们三个人分工明确,但调试时需要共同完成。一个人观察小车运行,一个人调整传感器或电位器,另一个人记录测试状态。
先知道作用,再判断安装和调试风险
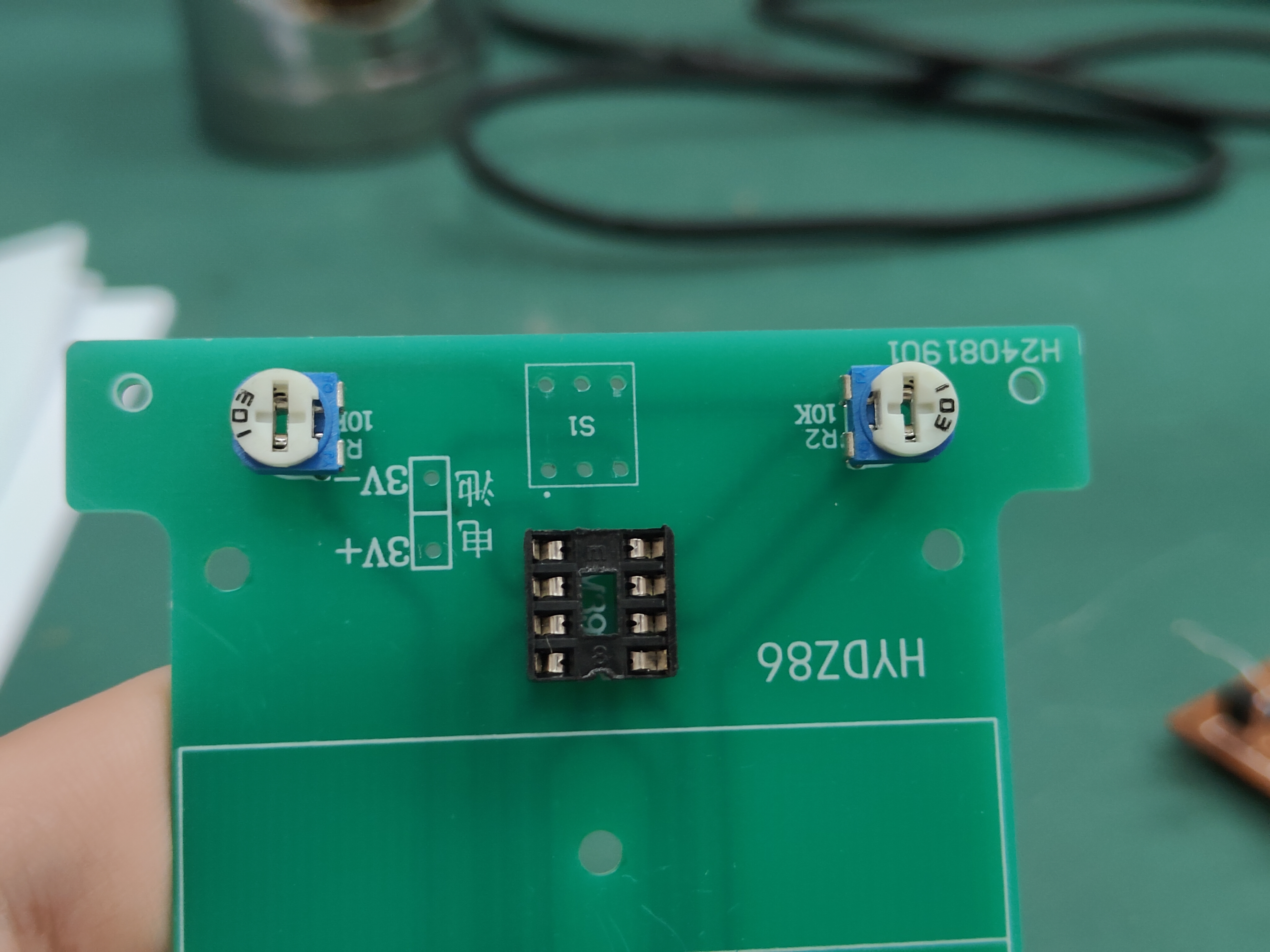
元件识别的重点是知道每个元件在小车里的作用,以及它可能造成什么故障。例如电解电容要注意正负极,LM393要注意IC座方向,光敏元件要注意离地高度。
按低到高顺序,重点检查方向和焊点
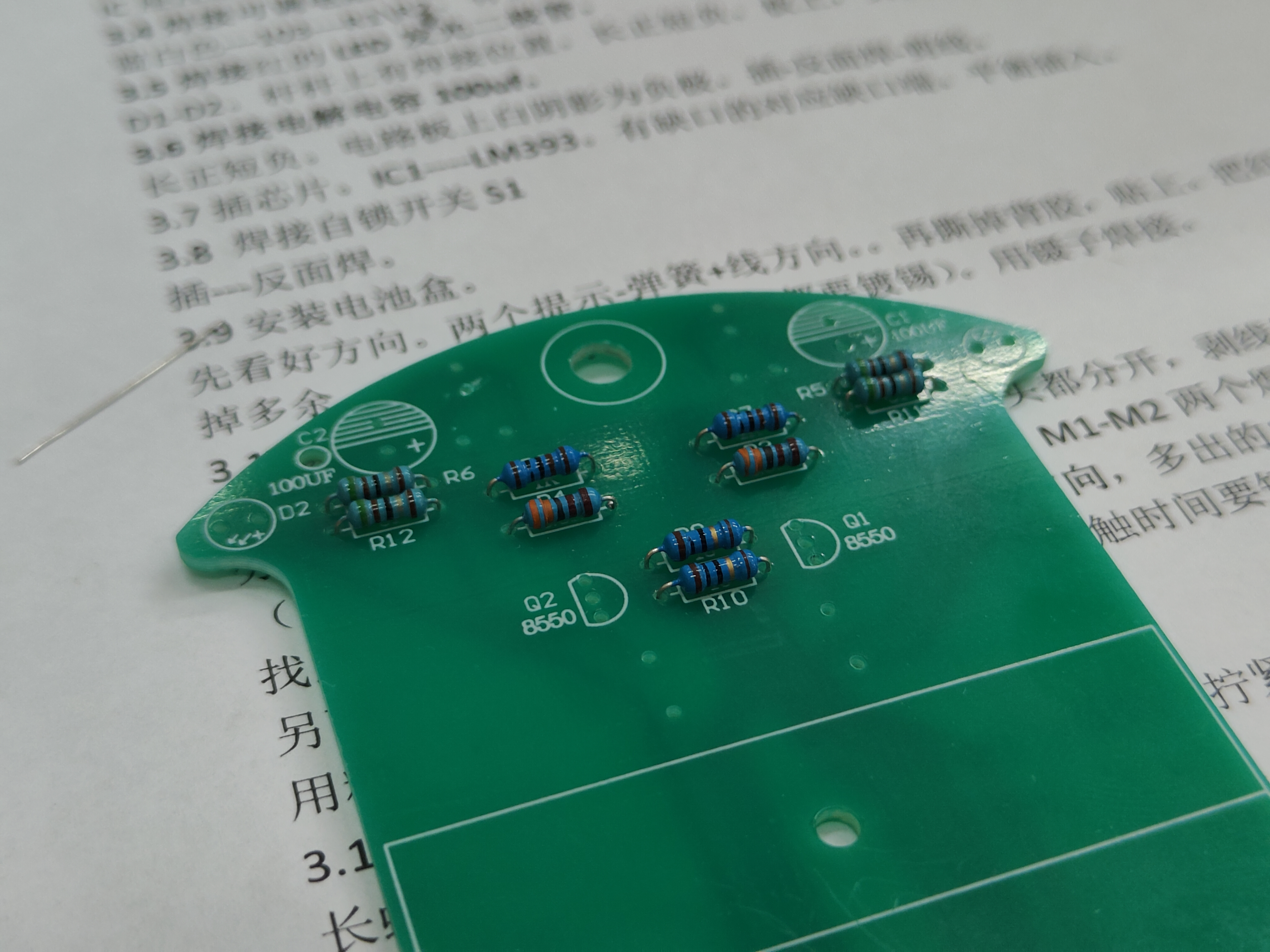
减少遮挡,让后续元件更容易定位。
正负极、管脚、缺口方向必须与丝印一致。
焊接质量差会让后续调试产生误判。
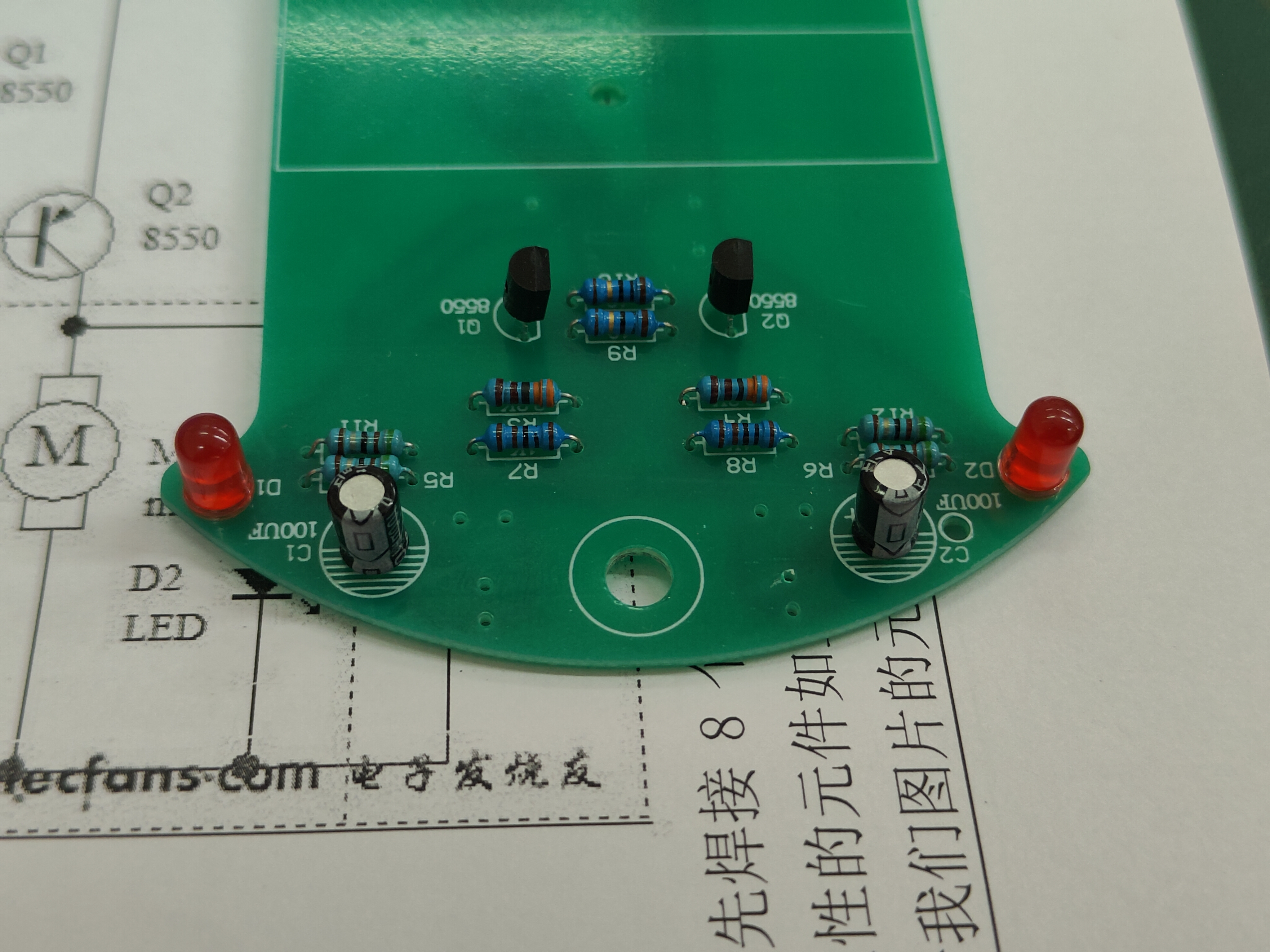
PCB焊接按从低到高的顺序进行,先焊低矮元件,再焊IC座、电容和导线。焊完后重点检查电容极性、三极管管脚、IC座方向和背面焊点。
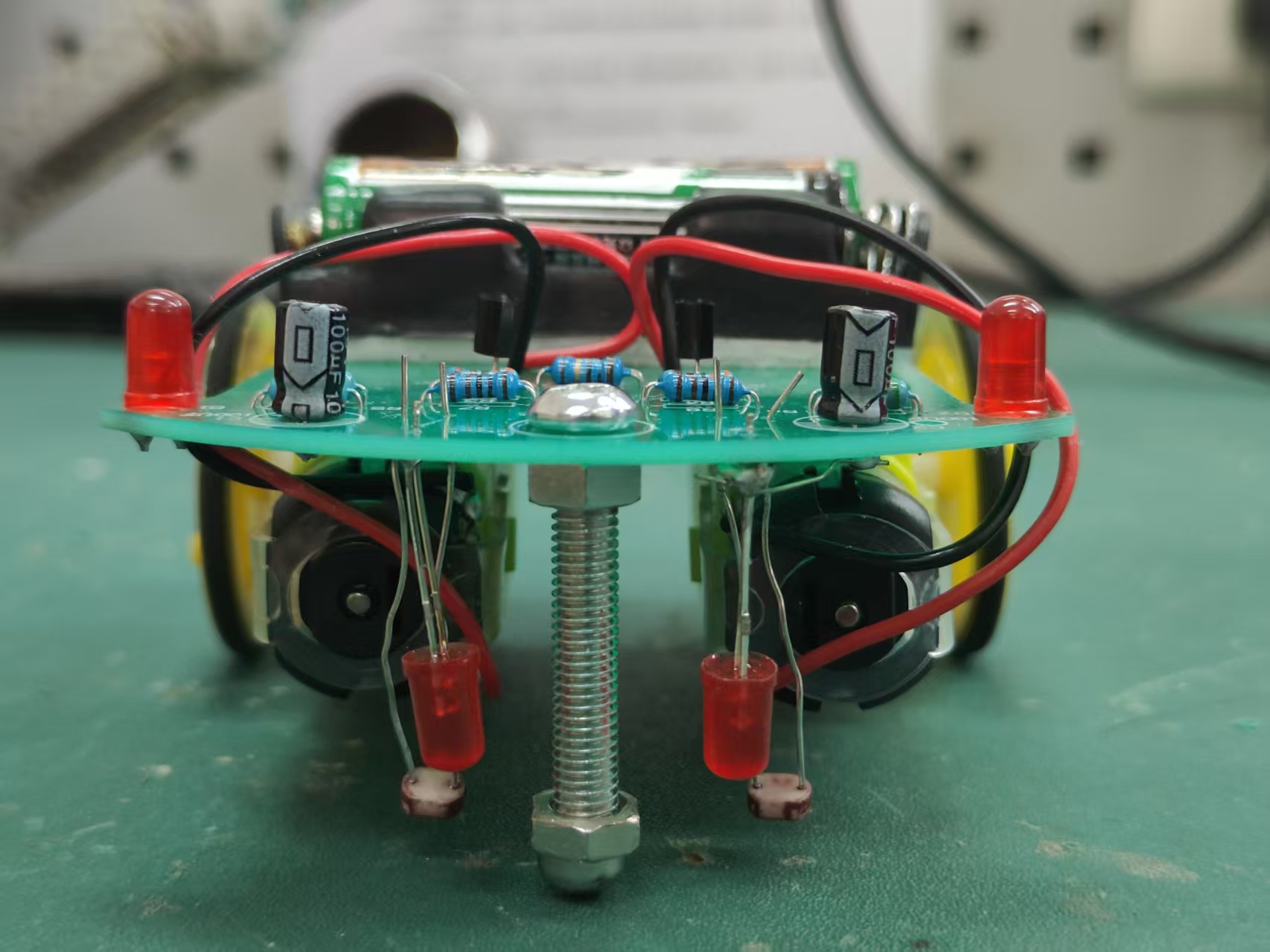
传感器信号最终转化为左右电机动作
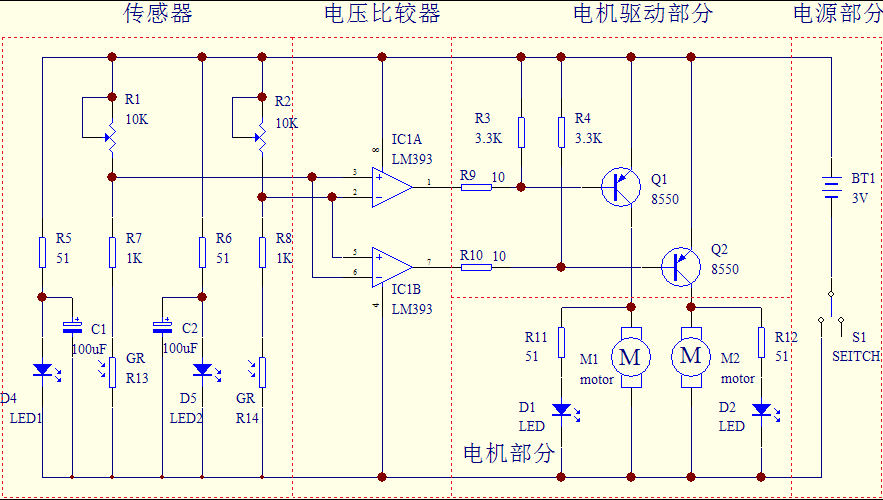
白底反光强
传感器输出电压较低,控制意义是保持或轻微修正。
黑线反光弱
传感器输出电压升高,触发比较器改变电机动作。
光敏传感器根据黑白反光差异产生不同电压,LM393比较这些电压,三极管控制电机动作。最终小车通过左右电机差速来修正方向。
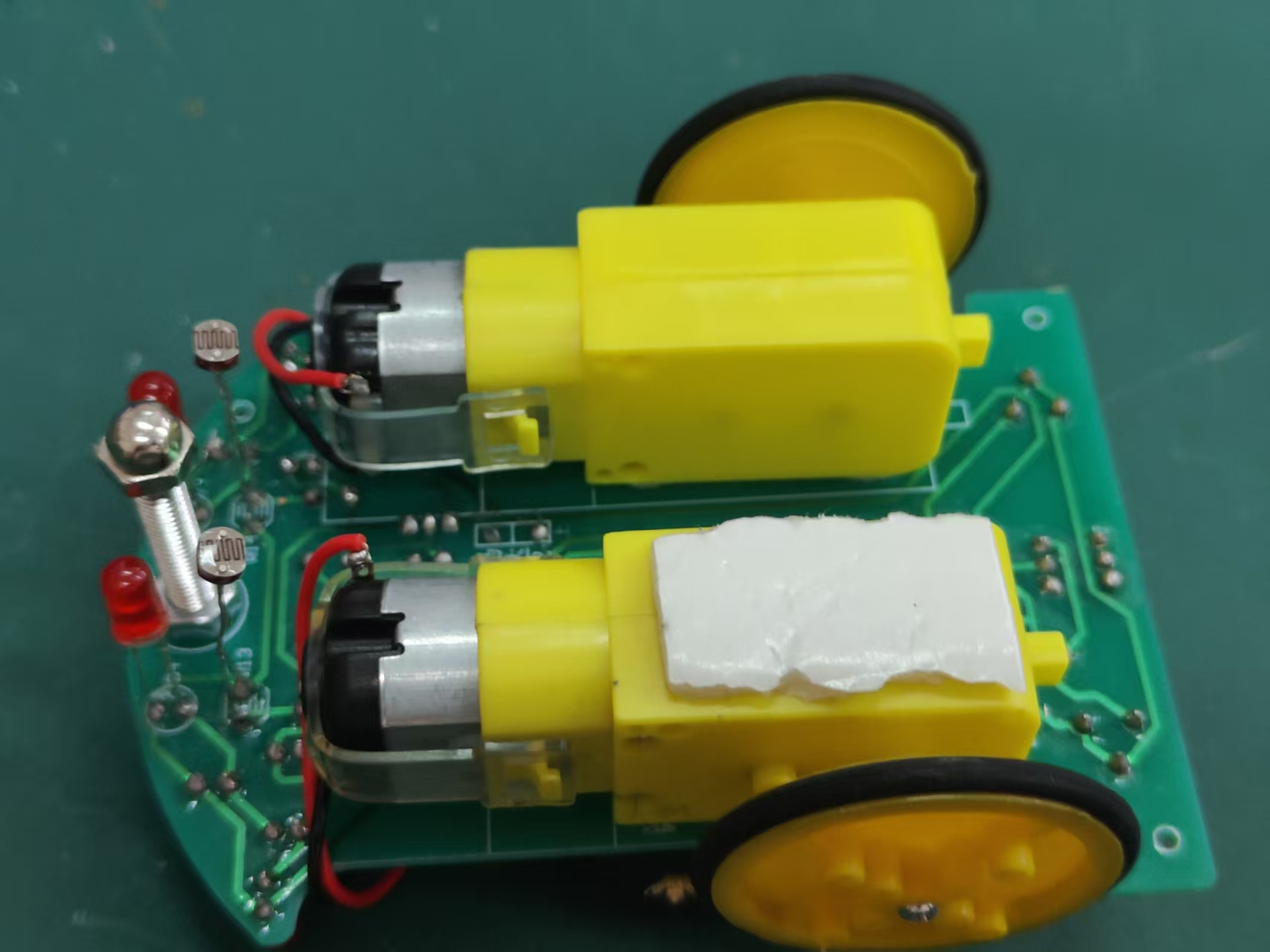
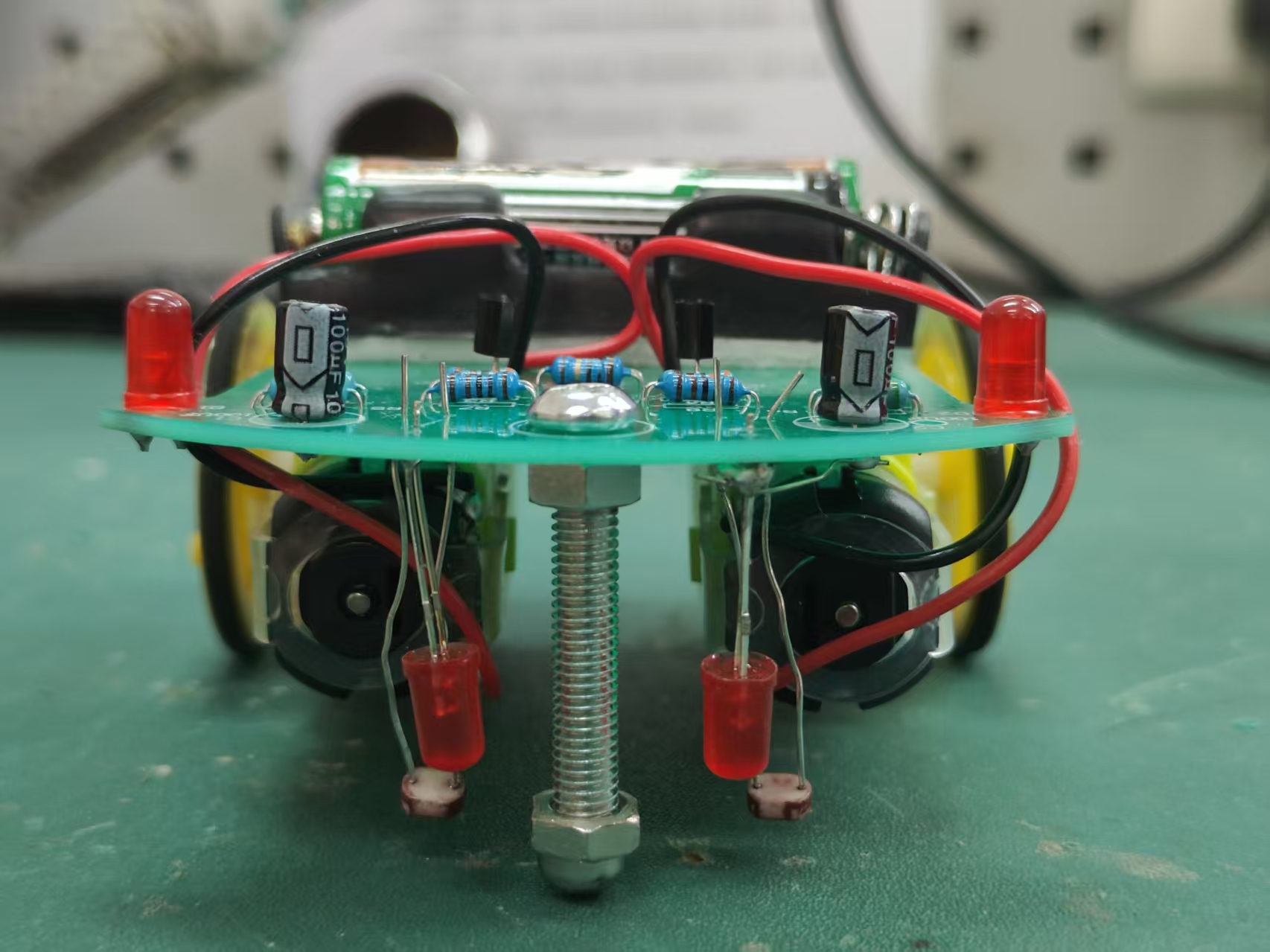
车轮、电机和传感器位置会影响运行稳定性

左右位置对称,避免单边偏移。
转动顺畅,减少直线跑偏。
固定稳定,不压迫导线。
避免导线干涉车轮和地面。
靠近地面但不摩擦轨道。
黑白不稳先查传感器高度和角度。
机械组装会直接影响循迹效果。电机和车轮要对称,导线不能碰到车轮,传感器要靠近地面但不能摩擦轨道。
用电压数据判断传感器和供电是否正常
数据来源:工作区《电位测试值.xlsx》与现场测试照片。
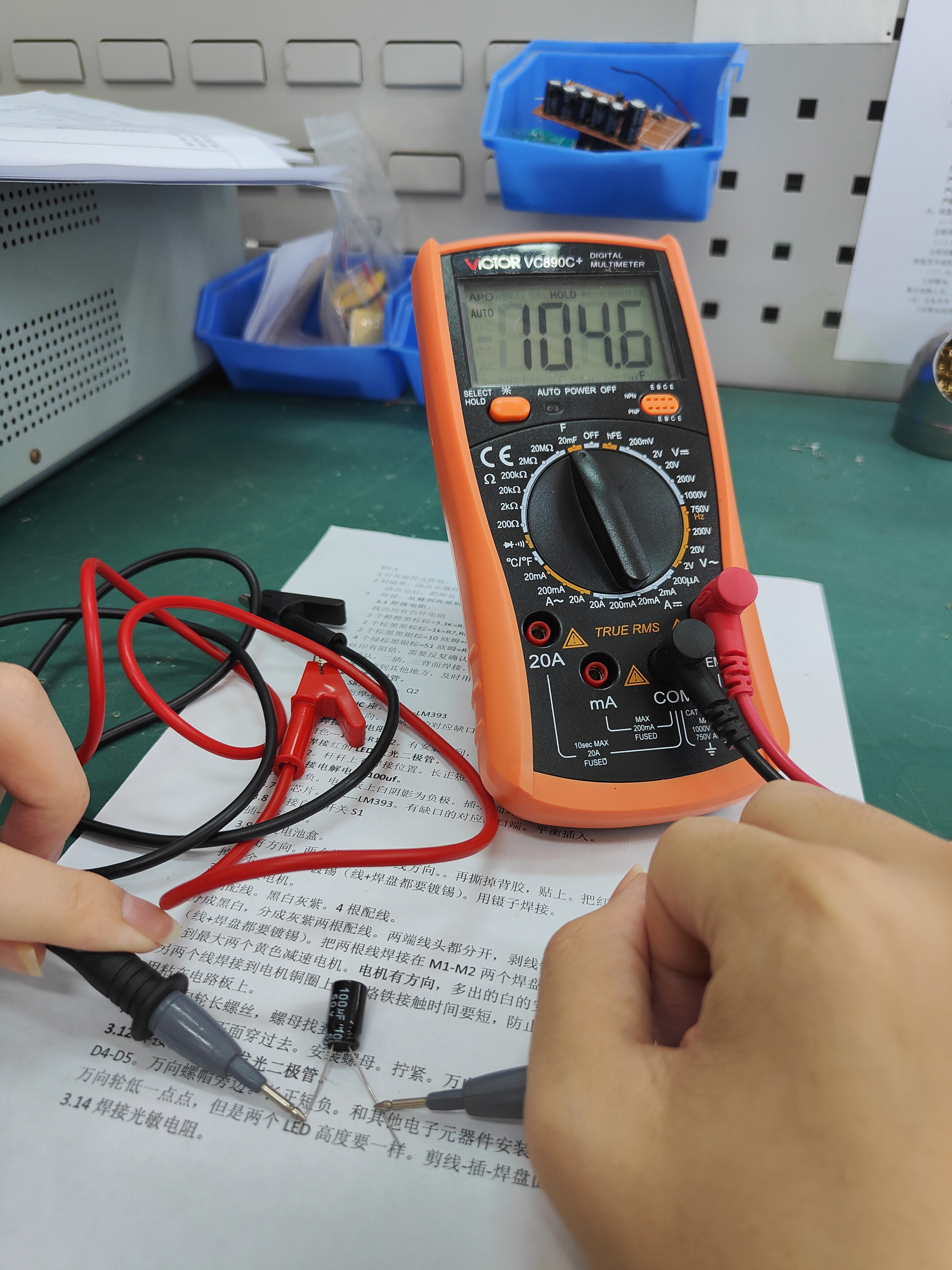
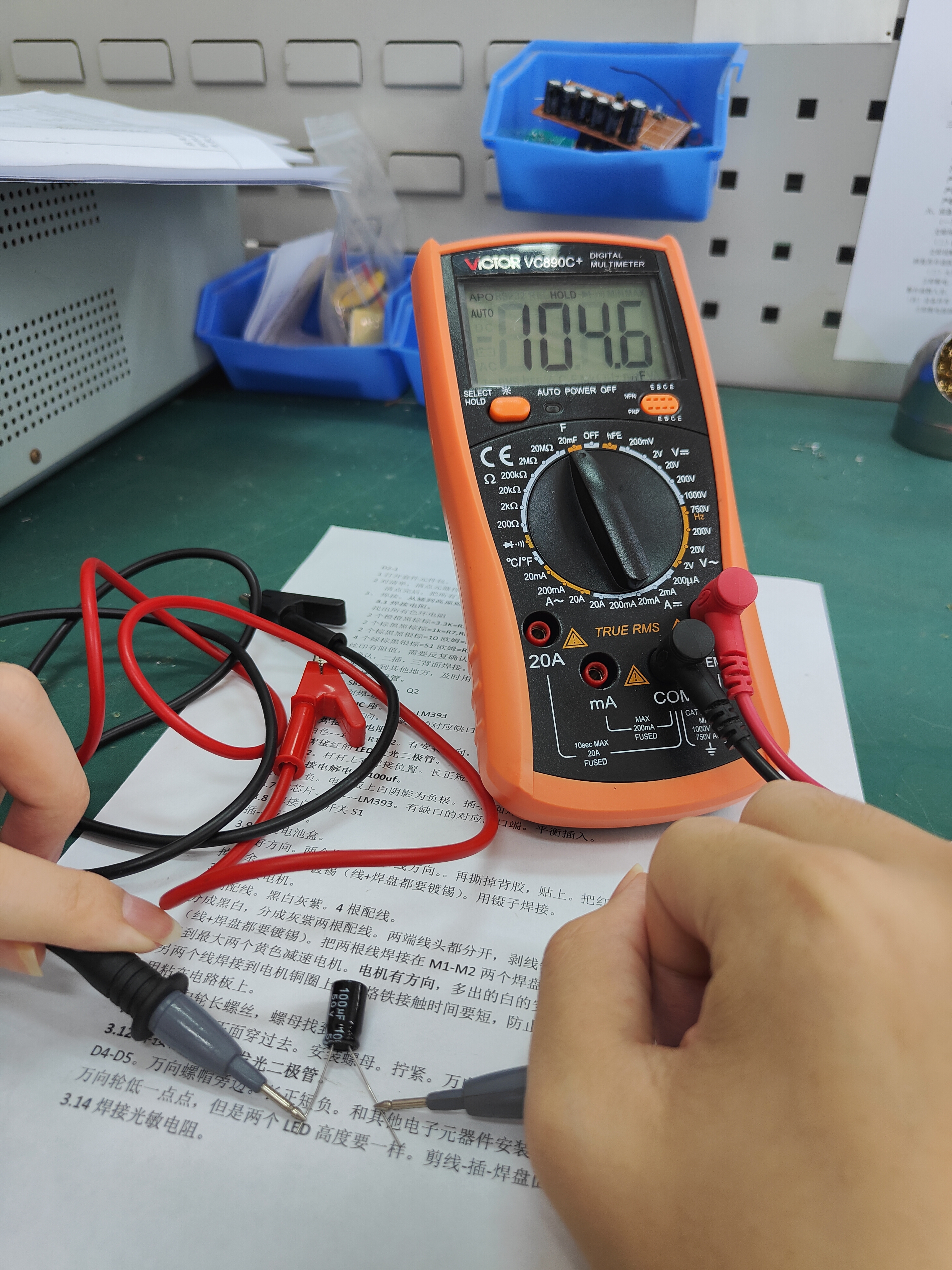
调试时用电压数据判断电路是否正常。VCC约2.95V,LM393供电约2.94V,左右传感器在白底和黑线下有明显电压差,说明传感器具备识别黑白轨迹的基础。
已能基本循迹,转弯稳定性还要优化
环境因素确实影响传感器。
阈值设置影响黑白判断。
识别窗口短,车轮差异会被放大。
结果
小车可启动,左右电机均能工作,逆时针方向可循迹。
问题
顺时针部分转弯处偶尔失稳,光照变化影响识别。
改进
调整传感器高度,优化光照,微调灵敏度,检查车轮平衡。
最终测试中,小车能够启动,左右电机均能工作,逆时针方向循迹效果较好。顺时针方向部分转弯处仍会失稳,后续需要从传感器高度、光照环境、灵敏度和车轮平衡继续优化。
完成从理论电路到实物作品的完整闭环
知道传感器、比较器、三极管、电机在系统中的作用。
能按顺序焊接并检查虚焊、连锡、方向错误。
能用电压数据判断供电和传感器状态。
认识到电路、机械和环境会共同影响效果。
分工完成制作,在调试阶段共同排查问题。
元件识别、电路焊接、机械组装、整车调试全部串联。
通过两周实训,我们完成了从元件识别、电路焊接、机械组装到整车调试的完整闭环。我们不仅理解了核心元件作用,也提高了焊接、测量、故障排查和小组协作能力。